User Tools
Site Tools
Table of Contents
Untethered GNSS Dead Reckoning Installation Guide
Introduction
Location service based on satellite link depends heavily on weather conditions and on the surroundings. Especially in dense urban environment, depots or tunnels, the satellite signal is obstructed and limits the performance of standard GNSS, therefore, a reliable position of the vehicle is not guaranteed.
As more and more services rely on uninterrupted position information, the need for an additional mechanisms to improve the reliability is given.
Three‑Dimensional Dead Reckoning completes the standard GPS/GNSS navigation by combining the satellite signal with additional information from gyroscope, accelerometer, vehicle speed and direction. This is especially important when quick navigation decisions must be made immediately upon exiting tunnels and parking garages
NetModule devices with GNSS Dead Reckoning support act as an Inertial Measurement Unit(IMU) and provide a dead reckoning solution based on the u-blox NEO-M8L chipset.

Gyroscope and accelerometer are integrated in the chipset – there is no need to add additional sensors, cabling, … to the installation. This operation mode is called Untethered Dead Reckoning (UDR) mode and is supported as standard feature.
Configuration
Caution: Activating GNSS dead reckoning with incorrect paramters will result in unusable GNSS performance, even in clear skies with satellite reception!
- Install the device tight in the final position. Be aware of:
- If the device is loose – the dead reckoning will not work properly.
- If you change either the position or the orientation of the device, you must redo the following procedure.
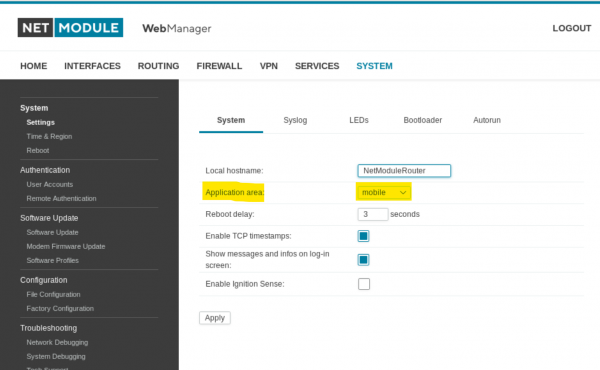
- Set the application area to mobile in the system menu
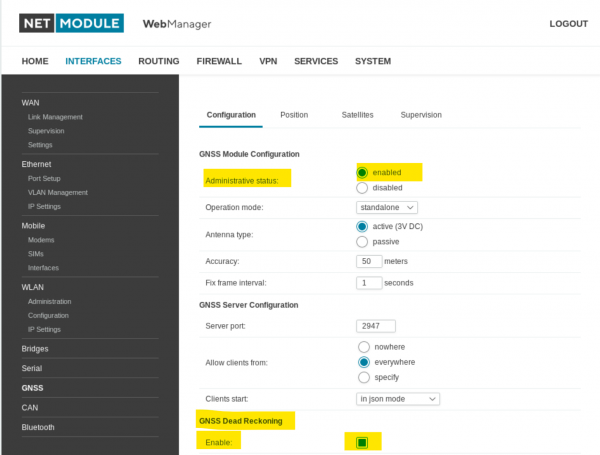
- Enable the GNSS and GNSS-DR mode in configuration page
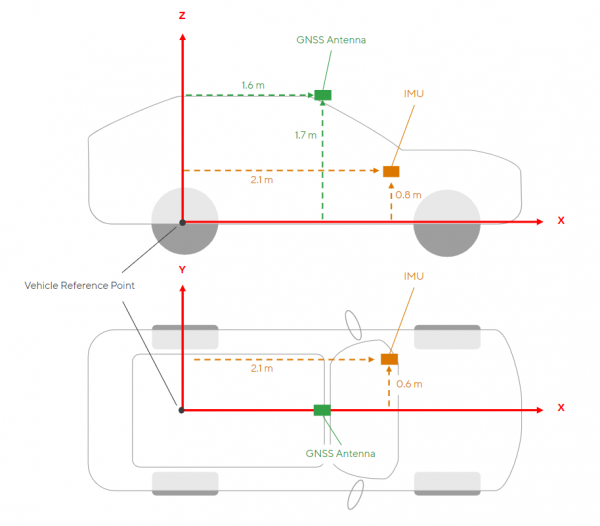
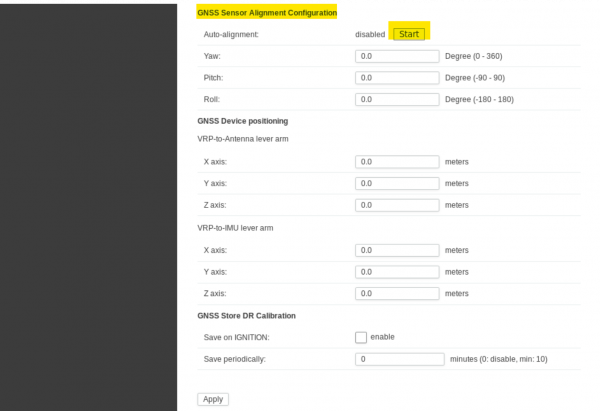
- Insert the x,y,z distances [m] into the VRP-to-Antenna and VRP-to-IMU lever arm lever arm fields in the GNSS configuration page
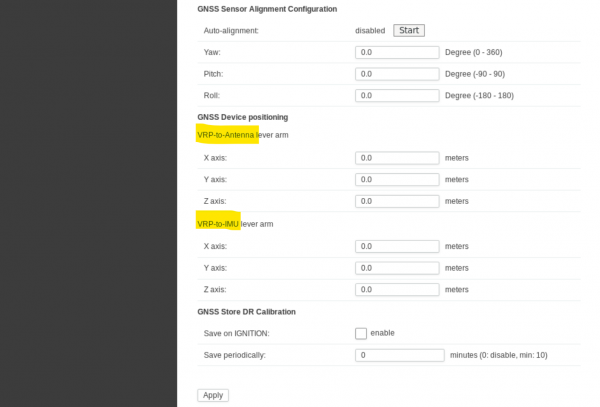
- Set values yaw, pitch, and roll of the IMU (NetModule router/device)
- For Rail Vehicle , the parameters must be entered manually. Please determine the exact installation position in relation to the vehicle, e.g. using CAD data, in order to achieve an optimum result. The GNSS IMU Alignment visualisation tool helps to check the parameters.
- For Street Vehicles use the auto-alignment feature to derive the values automatically. Please follow the procedure:
- Prepare the vehicle for a test drive.
- Switch on the device by starting the vehicle.
- Press [start] and don’t switch off the device during the test drive.
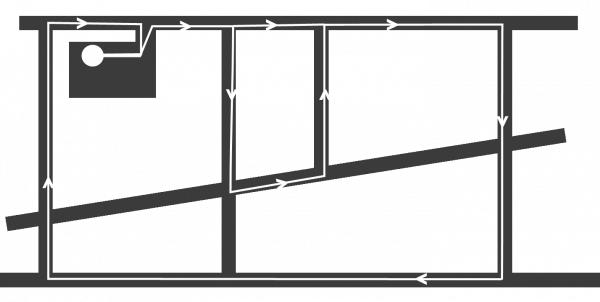
- Drive as many turns in both directions as possible und clear sky with satellite reception. Think of driving an 8 with your vehicle.
- Monitor the auto-alignment status, once it reaches fusion/3D fix, you find the auto detected yaw, pitch, and roll values already in the configuration page.
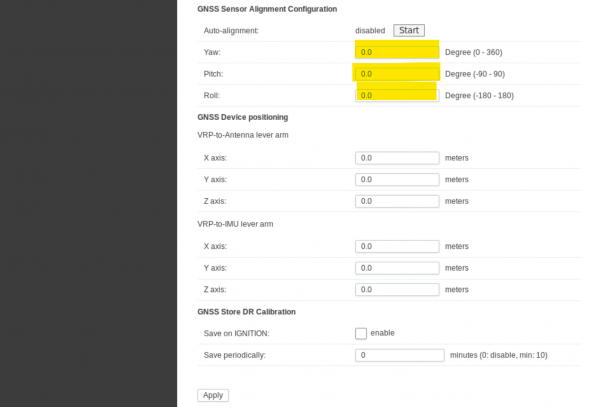
- Press the [Apply] button to permanently store the alignment values.
- The GNSS-DR chip may keep the last position even if the device is switched off. This leads to faster availability of a FIX with a reliable position after a restart.
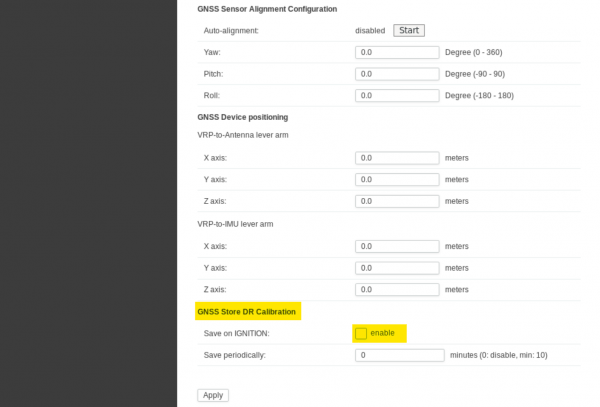








On the NG800 the GNSS chip enters a sleep mode if the device is shut down (=IGN/KL15 off) and permanent power (=KL30) is available. Do not enable any of the GNSS Store DR Calibration options for NG800. It may lead to misleading positions if the position and time is saved while the vehicle is still moving.